Technically, GreenBotAI focuses on the reaction and latency times of industrial robots, optimized path planning and the execution of certain tasks while the robot is still moving (“on-the-fly”). For example, 2D images can be captured for object recognition for the desired handling or assembly task without having to stop in between. Fraunhofer IWU is the consortium leader in the Franco-German research project.
For intelligent and flexible robotics
The project focuses on an agile approach to handling materials and workpieces. AI algorithms are intended to give manufacturing more flexibility and speed up production in a wide range of industrial sectors. The goal is intelligent robotics that can also perform complex tasks spontaneously. The required hardware components, state-of-the-art deep learning methods for monitoring and improvements in data processing and error control are intended to herald a generational change in robotics.
Reduce energy consumption without replacing robots
GreenBotAI is working on several levers to reduce energy consumption by up to 25 percent. These include data-reduced AI models, accelerated gripping tasks and reduced computing power.
Controlling complex motion sequences with simple image information
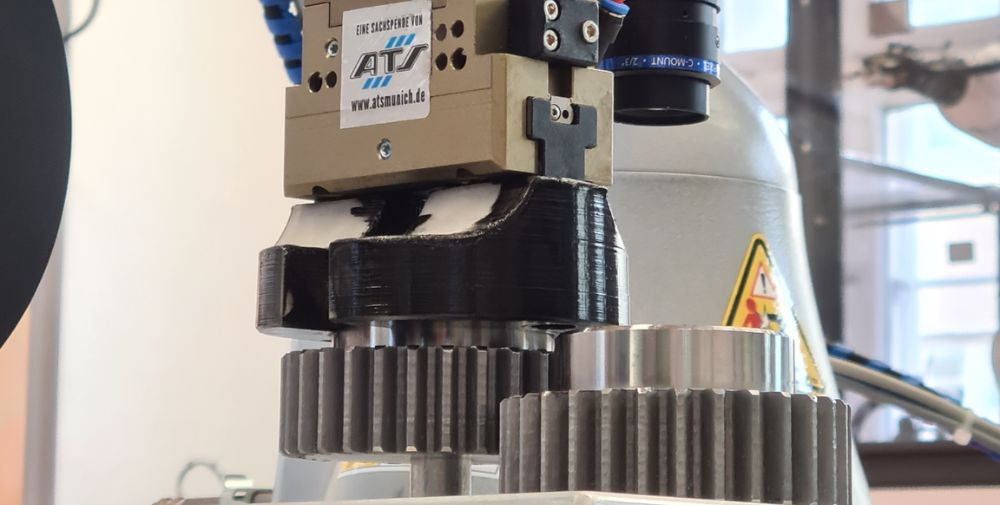
At the Hannover Messe, the project partners are demonstrating how much progress they have already made. A single image of the component taken in 2D using industrial camera technology (“one-shot demonstration”) and a small amount of computing power are all that is needed for the robot to pick up the component, check it and move it into the desired position. The Xeidana® software developed at the Fraunhofer IWU checks whether the correct component has been picked up. Visitors to the stand can try it out for themselves: They place a cogwheel anywhere on a table in the workspace of a collaborative robot (designed to work with people). Based on the image information, the software determines the positions of all objects relative to the robot, calculates the robot path and determines the gripping position. The robot then grips the cogwheel, inspects it and relies entirely on the image information. This is where the real-time capable evaluation of force data comes into play, which tells the robot how to fit the gripped cogwheel into a second cogwheel. This works with a smart AI application that imitates the human sense of touch. All of the robot’s real actions are also visualized via a digital twin. Visitors can also experience the assembly and the application for integrated quality control live.
In addition to Fraunhofer IWU, the project partners in GreenBotAI are Munich University of Applied Sciences (Faculty of Applied Sciences and Mechatronics), the software developer INBOLT SAS and the École Nationale Supérieure d’Arts et Métiers (ENSAM LISPEN). The funding body on the German side is the Federal Ministry of Economics and Climate Protection.
– – – – – –
Further links
👉 www.iwu.fraunhofer.de
Photo: Munich University of Applied Sciences/ Fraunhofer IWU