Worum geht es in dem Paper?
Das Paper vergleicht zwei unterschiedliche Konzepte, wie Fahrzeuge zuverlässig die Spur halten können. Dies ist besonders wichtig für das autonome Fahren. Dabei wird die Spurhaltung eines Fahrzeugs anhand von Simulationen und Modellfahrzeugen gegenübergestellt. Bei der ersten Methode handelt es sich um eine einfache Implementierung unter Verwendung eines PID-Reglers (Proportional-Integral-Derivativ). Dieser Regler hilft einem System, einen gewünschten Wert schnell und gleichmäßig zu erreichen, ohne zu über- oder untersteuern. Der zweite Ansatz beruht auf Bildverarbeitung in Kombination mit dem Stanley-Lenkungsregler, der entwickelt wurde, um ein zwei-achsiges Fahrzeug zu steuern, in dem nur Kurs- und Querabweichung vom zu verfolgenden Weg betrachtet werden.
Was wurde konkret entdeckt?
Die Ergebnisse zeigen, dass der komplexe Ansatz mit Bildverarbeitung und Lenkungssteuerung das Spurhalten deutlich verbessert im Vergleich zur anderen, einfachen Implementierung.
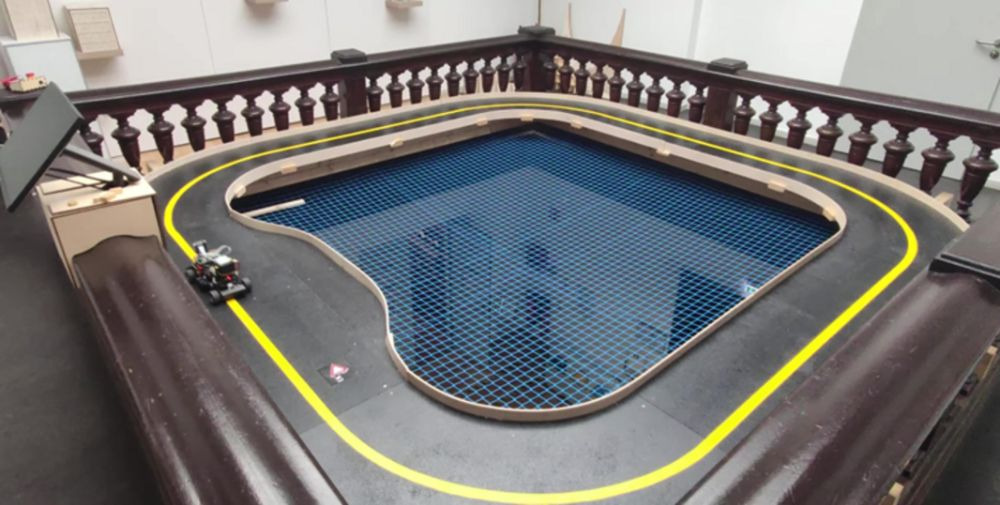
Bei niedrigen Geschwindigkeiten zeigt sich bei beiden Methoden ein ähnliches Verhalten. Bei 1,75 m/s kann die einfache Steuerung mittels PID-Regler das Fahrzeug sicher auf seiner Spur halten. Wenn die Geschwindigkeit des Modellautos 2,0 m/s überschreitet, lässt der PID-Regler das Fahrzeug gegen die Fahrbahnwand prallen. Bereits vor dem Erreichen dieser Geschwindigkeit ist es die Überwachung des Vorgangs sowie manuelle Notbremsungen erforderlich, um Zusammenstöße zu vermeiden. Im Gegensatz dazu, benötigt die komplexe Bildverarbeitung mit Stanley-Regler keine Überwachung, bis die Geschwindigkeit des Fahrzeugs 2,3 m/s erreicht. Bei höheren Geschwindigkeiten schlingert das Fahrzeug jedoch auf dem Kurs und hält nie die perfekte Spur.
Was sind die Auswirkungen für uns?
Mit der vorgestellten Stanley-Steuerung inklusive Bildverarbeitung konnten die Modellautos bei Geschwindigkeiten von 2,3m/s (entspricht ca. 8,3 km/h) zuverlässig ihre Spur halten. Dies gilt als Voraussetzung, um mit der Modellplattform verschiedene Verkehrsszenarien zu modellieren. Der komplexere Ansatz dient daher als Grundlage für spätere Tests von z. B. Überhol- oder Einfädelungsszenarien mit den eingesetzten Modellautos.
Wo können wir mehr darüber erfahren?
James Asghar, Paul Auerbach, Maximilian Matthé, Carsten Knoll, A Control Pipeline for Robust Lane Keeping in Model Cars, International Conference on Control, Mechatronics and Automation, 2023
– – – – –
Weiterführende Links
👉 www.barkhauseninstitut.org
👉 Vollständige Paper
Foto: Barkhausen Institut